
Šiame įraše pateiksiu savo pamąstymus. Prašau nedaryti jokių išvadų, tai tik pamąstymai 🙂
Atvirąjį žemėlapį OpenStreetMap dažniausiai kuria žmonės, kurie nėra profesionalūs GIS ar kartografijos specialistai. Tai žmonės, kuriems žemėlapiai yra hobis. Jei kas nors ir pasidomi, kaip dirbama su profesionaliomis GIS ar kuo užsiima kartografai specialistai, tai tik gerokai vėliau, kai jau būna stipriai įsijautę į atvirą žemėlapio kūrimo procesą. Kadangi daug kas kuriama ant tuščio lapo, kai kurie dalykai kai kuriems žmonėms gaunasi kiek kitaip, nei kad juos per šimtus metų padarė profesionalai. Konkrečių skirtumų yra daug, nebandysiu jų visų išvardinti, bet parašysiu savo pamąstymus apie vieną iš aspektų – patį požiūrį į žemėlapio kūrimo procesą.
Žemėlapių kūrimo trumpa istorija
Nuo seniausių laikų žmonės turėjo orientuotis vietovėje. Tai ypač svarbu buvo tiems, kas judėdavo gan daug – medžiotojai, klajokliai ir pan. Žemėlapius jie turėdavo savo galvoje: žinojo, kad norint iš A nueiti į B, reikia eiti per mišką, tada ties upės vingiu per brastą nusigauti į kitą krantą, kur perėjus pievą, už kalniuko ras norimą tašką. Tokią informaciją galima pasakyti žodžiais, bet jei taškų turime ne du, tai galimų maršrutų skaičius didėja gan sparčiai. Taigi žmonės pradėjo daryti žemėlapius. Pavyzdžiui tokius Maršalo salų pagaliukų žemėlapius:
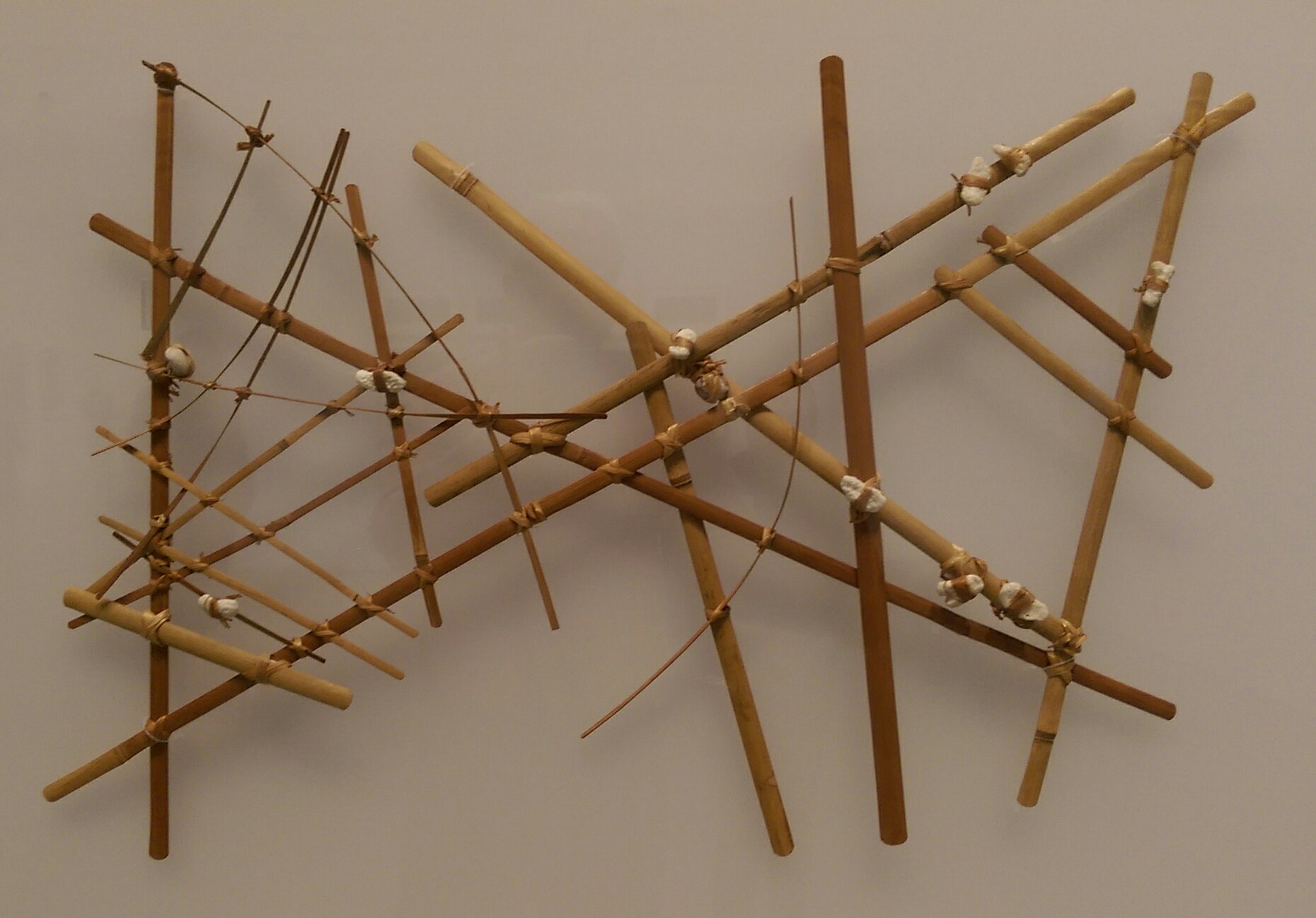
Šis žemėlapis skirtas plaukiojimui vandenyne. Jis rodo vyraujančias bangavimo kryptis ir salas. Taigi abstrakčiais simboliais išreikšta žemėlapio tikslui – navigacijai – svarbi informacija.
Orientavimuisi žemėje žemėlapiai irgi buvo kuriami panašiu principu – nusprendžiama, kokią informaciją norima parodyti, sugalvojami jos simboliai ir tada pagal galimybes atsižvelgiant į objektų tarpusavio santykį simboliai sudėliojami paprastai ant plokštumos.
Žinoma pozicijų ar atstumų prasme tokie žemėlapiai buvo gana netikslūs, bet jie atliko savo pagrindinę funkciją – perteikė informaciją, būtiną orientavimuisi vietovėje.
Vėliau atsirado galimybė pozicijas skaičiuoti pagal žvaigždes, sugalvota trianguliacija (tikslaus žemėlapio karkaso kūrimas) ir kažkada buvo pastebėta, kad dar tikslesnes objektų pozicijas galima nustatyti naudojantis iš oro darytomis fotografijomis.
Nesistengiu tiksliai aprašyti kartografijos vystymosi istorijos, apie tai rasite labai daug informacijos internete. Esminis punktas – žemėlapio kūrimas prasideda nuo žemėlapio tikslo sugalvojimo. T.y. kam tas žemėlapis bus naudojamas. Tada nusprendžiama kokia informacija reikalinga, o kokia nereikalinga. Kadangi informacijos perteklius skandina esminę informaciją ir dėl to žemėlapį skaityti darosi sunkiau, todėl papildomai dar nusprendžiama, kaip informacija bus abstrahuojama. Tik tada yra naudojamos įvairios priemonės, padedančios norimus objektus žemėlapyje išdėstyti tiek tiksliai, kokie buvo poreikiai. Ortofotografijų naudojimas yra tik vienas iš būdų tiksliau nustatyti objektų pozicijas.
Atvirkštinis žemėlapio kūrimo procesas
O dabar grįžkime atgal į OpenStreetMap planetą. Jau senokai pasibaigė laikai, kai norint žemėlapyje pažymėti vieną ar kitą objektą, reikėjo važiuoti į vietą su GPSR įrenginiu, atlikti vienokius ar kitokius vietos ir objekto savybių fiksavimo veiksmus ir tada grįžus namo būdavo galima įvesti objektą į OpenStreetMap duomenų bazę.
Dabar praktiškai visi naujokai apie žemėlapio žymėjimą sužino paspaudę mygtuką „Keisti“, kuris jiems atveria iD redaktorių:
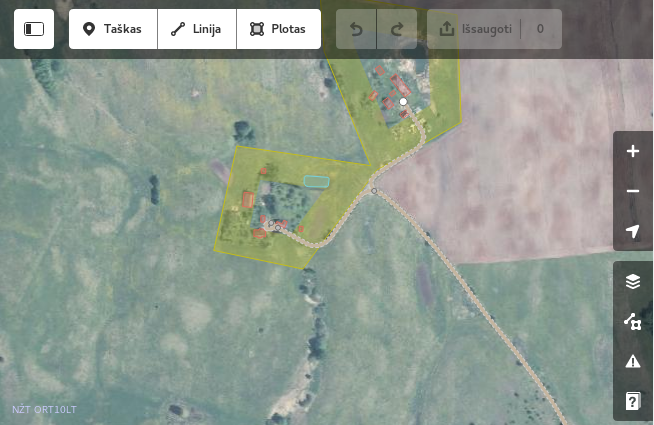
Ką mes matome labiausiai? Per visą įmanomą plotą – ortofotografiją.
Puiku, naujus objektus žymėti „apačioje“ turint ortofotografiją yra labai patogu! Va, čia matau namuką – pažymėkime. Čia matau upeliuką – pažymėkime. Čia matau kelią – pažymėkime. Va čia, prie mano sodybos, yra mūsų sukurta tinklinio aikštelė – pažymėkime.
Ir tik viską sužymėjus pradedama žiūrėti: „ar rodo žemėlapyje?“. Jei nerodo (t.y. nerodo OpenStreetMap-Carto), gal rodo koks nors kitas specializuotas žemėlapis.
Taigi visas procesas apsiverčia aukštyn kojomis. Iš pradžių nubraižom (dažnai tiesiog viską, ką matome, dažnai su labai smulkiomis detalėmis), o tada galvojam kam to reikia.
Vertinimai, pamąstymai
Vienareikšmiškai negalima pasakyti, gerai ar negerai toks proceso apsivertimas.
Minusas būtų tai, kad bežymint objektus gali atsitikti: „o čia yra… nežinau… kažkoks kvadratinis dalykas, jis aiškiai matosi ortofotografijoje – apibrėžkime jo geometriją (plotą), reikia pridėti kokias nors žymas, paieškokime ko nors panašaus, ai, tegul būna tiesiog lankytina vieta“. Taigi stengiamasi vektorizuoti viską viską, tarsi vėliau iš turimų poligonų būtų bandoma sukurti tokį patį vaizdą, kaip kad buvo ortofotografijoje. Tik tokiu atveju kam iš viso vektorizuoti – naudokim ortofotografiją – patogu ir paprasta.
Žinoma galima sakyti: taigi žmonės stengiasi sužymėti viską viską, kad tada būtų galima sukurti bet kokius žemėlapius! Teoriškai taip, tik problema tame, kad tiksliau tai būtų įvardinti „…tada kas nors kitas kada nors galbūt norės sukurti tokį ar anokį žemėlapį“, kas realybėje beveik visada reiškia „niekada“. Laiko švaistymu to pavadinti negalima, nes atvirasis žemėlapis – hobis, vektorizavimas iš principo veikia raminančiai. Tik tiek, kad duomenų bazėje atsiranda objektai, kurie į žemėlapius niekada nepateks, bet braižant toje vietovėje jie atima dėmesį vektorizuojant kitus objektus. Arba objektai nubraižomi tokiu detalumu, kuris nebus naudingas jokiame žemėlapyje. Pavyzdžiui kai takais išmindytoje pievoje landuse=meadow sudedama tik tose vietose, kur ortofotografijoje matosi žolė.
Bet yra ir pliusų. Jei prieš žymėjimą turėsime susirasti (ar nuspręsti susikurti) dominantį žemėlapį, tai labaaai nedaug naujų žymėtojų atsiras. Žymėjimo su ortofoto paprastumas leidžia žmonėms suprasti, kaip paprasta yra redaguoti OpenStreetMap žemėlapį. O tada jau tikimasi, kad nauji žymėtojai greitai supras kaip kur kas ir persiorientuos iš „žymim viską, ką matom ortofoto“ į „pildome duomenis mane dominantiems žemėlapiams“.
Tai tokie būtų mano pastebėjimai. Iš tikrųjų tai nežinau, gerai tai ar negerai, bet turėti bendrą vaizdą mintyje, mano galva, reikėtų visiems.





